リザードロイドは、人や物を検出する赤外線センサー搭載のエリマキトカゲ型ロボットです。 2通りの動作モードがプログラムされていて、本物のようにエリマキを広げ素早く動きます。 ●赤外線センター搭載 ●マイクロコンピューター搭載 完成サイズ:W129×D370×H230mm ※別途単4電池4本必要 難易度★★★
赤外線レーダー搭載。6足歩行ロボ! 2種類のモードで迷路を作って一緒に遊ぼう。 完成サイズ:W150×D155×H155mm ※別途単4電池4本必要
マグネシウム燃料電池で動くクモ型ロボットです。 8本の足でリアルにスピーディーに動く姿にみんなびっくり! 完成サイズ:W120×D110×H45mm マグネシウムシート(3枚・1枚で約4時間走行
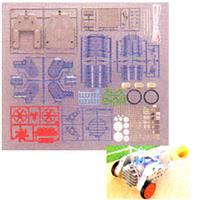
4タイプの超変形! ・2足歩行の恐竜モード ・角が動いてあるく昆虫モード ・ドリルが回転して走行モード ・2足歩行ロボモード 完成サイズ(目安):W95~53×D136×55×H105×55mm 組立タイプでサイズは変わります。
ギアの仕組みでポップに動くソーラー発電ロボットです。 完成サイズ:53×48×67mm 難易度:ふつう
人体感知センサーで人の動きをキャッチすると描いた絵がクルッと切り替わるインタラクティブお絵描きボードです。難しい電子回路部は組み立て済なので、はんだ付けは必要ありません。 SWITCHは「アルス・エレクトロニカ・フューチャーズラボ」との共同研究から開発されました。 制作時間の目安:4~5時間 使用電池:単4×3本[別売] 完成サイズ:W260×D45×H260mm 重量:約300g
●乾電池不要!6つの関節でスマートな動き! ●シリンダー内の水に力を加えることで生まれる「水圧」で動作するロボットアームです。 ●アームの先のグリッパーで物を“つかむ”、“放す”の操作が可能です。また、グリッパーを外すと吸盤モードに変えることができ、平らな物をくっつけて持ち上げることもできます。 完成サイズ:W242×D525×H415mm ※細かい部品がありますので組立は保護者の方と一緒に作ってください。 難易度★★★
ソーラー発電で動く全地形型のローバーロボット 完成サイズ:75.5×79×105mm [商品特徴] 4輪駆動 6輪サスペンション ギアがかっこいい! 難易度:ふつう
キャスターと2本のタイヤを使った、コントロール性の高いタイヤ駆動のリモコンロボットを作るために必要な部品をセットしました。ツインモーターギヤボックス、クランクギヤボックス、リモコンボックス、ボールキャスター、トラックタイヤ、ユニバーサルアーム、ユニバーサルプレート、3mmプッシュリベットが入っています。組立説明書にはアームを使って物をはさむ「ロボットアーム型」をはじめ、「ショベル型」、「バケット型」の3タイプの製作例とロボット競技例を掲載。さらに工夫しだいで様々なロボットが作れます。●単1形電池2本別売
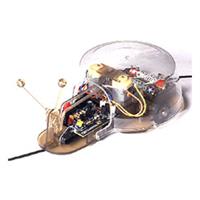
白い紙に書かれたサインペンなどの黒い線にそって、突き出た目を前後に動かしながらゆっくり進むかたつむりの組み立て工作セットです。動きの秘密は赤外線LEDとその光を検知するフォトトランジスタ。2個のモーターをコントロールして進みます。紙の大きさや線の太さに対応できるように速度切り換えスイッチと感度調節用ボリュームが付いています。かたつむりのボディやシャーシはクリヤーパーツとしてメカニカルムードもたっぷり。センサーユニットには基板、センサー、モーター2個を配線ずみ。ビス止めとはめ込み、少しの配線で手軽に組み立てられます。 ●完成時の全長176mm、全幅114mm。動力電源:単3アルカリ電池2本(別売)。
FMワイヤレスマイクにボイスチェンジャーの機能をプラスした、ユニークなワイヤレスマイクです。 ボイスチェンジャー部は高音~低音に7段階で変化。さらにロボットボイスモードを装備していますので、多彩な変声を楽しむことができます。ワイヤレスマイク部は約15m先のFMラジオに飛ばせます。 ※到達距離は障害物の有無、FMラジオの性能で変化します。 ※マイクに向かってしゃべる声を集めるための「フード」を取り付けることができます。(フード作成型紙付きです。) 制作時間の目安:3~4時間 [仕様] 使用電池:単3×2本[別売] 消費電流:約13mA 周波数調整範囲:約75MHz~89MHz 到達距離:約15m 完成サイズ:W50×D35×H80mm
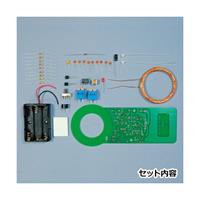
検出部にループコイルを使用した高感度な金属探知機です。 ブザーとしてLEDでお知らせします。 金属を検出する仕組みを解説した説明書付き。 ※壁の厚さや素材により検出できない場合もございます。 制作時間の目安:3~4時間 [学習要素] 1.金属を検出するしくみ 2.電子回路の働き [仕様] 使用電池:単4×3本[別売] 完成サイズ:W150×D62×H18mm 消費電流:検出時:最大約15mA、待機時:約2mA
小さなボディーに光センサー2個、タッチセンサー2個を搭載した入門用プログラミングロボットキット。 長きにわたりご愛顧いただいたKOROBOがリニューアルにして新登場となりました。 専用ソフト「Palette IDE」(パレットアイディー)を使ったプログラミングは命令アイコンを並べるだけの簡単操作。 サンプルプログラムをたくさん用意しており、プログラミングが初めての人でも安心してロボットを動かしながらプログラミングを覚えることができます。 ●使用電源:単3乾電池×4本(別売り) ●付属センサー:光センサー×2、タッチセンサー×2 ●その他:出力モーター×2、ブザー×1、LED×1 完成時サイズ幅110mm×高さ100mm×奥行き170mm 付属品:USBケーブル ■シンプル機構で組み立て簡単 工作初心者でも気軽に組み立てられ、よりプログラミングに集中できます。 ■組み立て自由度の高いボディ ボディーにあいている穴を利用し、いろいろな場所にセンサーを取り付けられ、自分だけのオリジナルロボットを作れます。
【学習要素】 (1)モーターの正・反転回路の原理 (2)ギアの原理と基礎知識 (3)樹脂成形の基礎知識 3つのタイヤを搭載したタイヤ駆動型のメカ工作キットです。専用コントローラーで操作、直進や後退、右左折などの動きはもちろん、第3のモーターでファンを動かし、空気の力を借りてボールをキャッチ、シュートすることができます。 【仕様】 ●使用乾電池:アルカリ単3x4本[別売] ●消費電力:動作時約550mA(最大約900mA) ●寸法:(本体)W135xD200xH130mm 突起部含まず、(コントローラ)W95xD31xH126mm コード長:2m ●重量:(本体)約280g、(コトローラ)約140g コード含む
【学習要素】 (1)モーターの正・反転回路の原理 (2)ギアの原理と基礎知識 (3)樹脂成形の基礎知識 3つのモーターを搭載したタイヤ駆動型マシンてず。コントローラーにより4方向自在に走行し第3のモーターでボールのキャッチ・シュートが楽しめます。 【仕様】 ●使用乾電池:アルカリ単3x4本[別売]寿命約2.5時間 ●消費電力:動作時約550mA(最大約900mA) ●寸法:(本体)W130xD120xH77mm 突起部含まず、(コントローラ)W95xD31xH126mm コード長:2m ●重量:(本体)約250g、(コトローラ)約120g コード含む ●付属品:ボール
【学習要素】 (1)モーターの正・反転回路の原理 (2)ギアの原理と基礎知識 (3)樹脂成形の基礎知識 3つのモーターを搭載した6本足歩行のマシンです。コントローラにより4方向自在に歩行し第3のモータで勢い良くボールをシュートできます。 【仕様】 ●使用乾電池:アルカリ単3x4本[別売]寿命約2.5時間 ●消費電力:動作時約550mA(最大約900mA) ●寸法:(本体)W85xD170xH140mm 突起部含まず、(コントローラ)W95xD31xH126mm コード長:2m ●重量:(本体)約250g、(コトローラ)約140g コード含む ●付属品:ボール
AM・FM・ワイドFM対応。 電波をデジタル処理するDPS方式のICを使用。 [学習内容] 1.ラジオの仕組み 2.電子回路図 3.はんだ付け工作 [商品仕様] 使用電池:単3電池2本(別売) 完成サイズ(W×D×H):122mm×50mm×80mm 消費電流:35mA(ボリューム位置中間時) 受信周波数:AM(522KHz~1620KHz)、FM(76MKz~108MHz) ※制作目安時間:4~6時間 ※要ハンダ
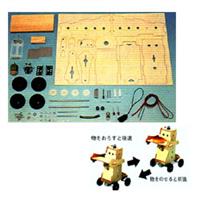
製作図付 電池別 使用乾電池:単3x2本 電気1の回路学習が新感覚のロボットづくりで学べます。 ●直列回路、並列回路、そして+、-の逆転回路など、電気回路の基礎学習がすべて含まれた教材キットです。 ●物をのせると前進、物をおろすと後退、その間ヘッドランプや目が点滅するなど、さまざまな機能を生かしたポーターロボットです。現代版お茶運び人形として楽しみながら学習・製作ができます。
製作図付 電池別 使用乾電池:単3x2本 物をのせるとランプをつけて前進、物をおろすと後退する組み立て学習に適した歩くお茶運び人形です。手を振りながら歩くロボトにも改造できます。
ラジオ用ICとパワーアップ用ICを使用したAMラジオです。 ラジオの受信方式にストレート方式を採用しているため、感度の微調整が不要となり、大変作りやすくなっています。 [学習要素]1.ラジオのしくみ2.回路図・ブロック図3.はんだ付け工作 [仕様] ・使用乾電池:単3×2本(3V)[別売] ・消費電力:平均約27mA ・受信周波数範囲:530~1650KHz ・受信方式:ストレート方式 ・使用半導体:IC 2個 ・基板寸法:100×100mm ※電池別
シースルーボディでメカが見え、動きがわかります。 専用コントローラで5つの指令を同時に制御。 [学習内容] 1.ロボットに対する知識と歴史 2.ギアの原理と基礎知識 3.平行クランク機能の原理 4.滑りクラッチの原理 [商品仕様] 使用電池:単1電池4本(別売) 完成サイズ:本体(最大旋回半径360mm、最大高510mm、基台部180mm×180mm) 完成サイズ:コントローラー(130mm×80mm×45mm) 質量:本体(1.05kg)、コントローラー(150g・電池含まず) 消費電流:300mA(無負荷時) 消費電圧:±3V ※制作目安時間:4~6時間 ※要ハンダ
後足を同時に回転させて、地面をけるようにしながら進むカンガルー型ロボットの組み立てキットです。クランクプレートを使ってモーターの回転を後足に伝達。低速では前足、高速ではシッポを使って走りを安定させます。またシッポは取り付ける向きが変えられ、まっすぐにすれば直進し、右に曲げて取り付ければ右に、左に曲げて取り付ければ左に進ませることができます。クリヤーオレンジの足や胴体、透明パーツのギヤボックスやスイッチなど必要な部品はすべてセット。はめ込みとビス止めで組み立てられ、配線もゴムパイプを使って手軽にできあがります。組み立て用のプラス・ドライバー付き。 ●完成時の全長180mm、全幅77mm。モーター、逆転スイッチ付き。単3電池1本使用(別売)。
ツノを左右に動かして壁などの障害物をよけながら4つの足で歩くカブトムシ型ロボットの組み立てキットです。モーターの回転をクランクで往復運動に変えて前後の足を動かし、右前足の動きをリンクロッドでツノに伝えます。大きなツノや4本の足などはクリヤーグリーン、ギヤボックスやスイッチは透明パーツでメカニカルムードあふれる仕上がり。もちろん動きのしくみもよくわかります。歩くスピードは2種類が選択可能。はめ込みとビス止めで組み立てられ、配線もゴムパイプを使って手軽に完成します。 ●完成時の全長195mm、全幅88mm。モーター、逆転スイッチ付き。単3電池1本使用(別売)。
長い足をゆったりと動かして2足歩行するダチョウをモデルにしたロボットの組み立てキットです。モーターの回転をギヤボックスで減速し、クランクプレートを使って足に伝えます。クリヤーバイオレットの長い足や胴体、小さな頭、クリヤーパーツのギヤボックスやスイッチなど、クリヤーパーツを多用したスケルトンタイプですから、動きのメカがよくわかります。はめ込みとビス止めで組み立てられ、配線もゴムパイプを使って手軽にできあがります。動かして遊ぶのはもちろん、インテリアのディスプレイとしても楽しめるかわいらしいデザインです。 ●完成時の全長107mm、全高135mm。モーター、逆転スイッチ付き。単4電池1本使用(別売)。
左右の足を同時に動かしてピョンピョンはねるように走るウサギ型ロボットの組み立てキットです。モーターの回転をギヤボックスで減速。クランクプレートを使ってモーターの回転を後足に伝達し、その動きをリンクロッドで前足に伝えます。長い耳を持った顔や丸いシッポ、足や胴体はかわいらしいクリヤーピンク。ギヤボックスやスイッチは透明パーツとしました。必要な部品はすべてセットされ、はめ込みとビス止めで組み立てOK。配線もゴムパイプを使って手軽にできあがります。またミニ四駆コースを走れるガイド付き、仲間を集めてのラビットレースも楽しみです。●完成時のロボット本体全長116mm、全高90mm、全幅112mm。モーター、2チャンネルリモコンボックス付き。単3形電池2本使用(別売)。
前後の足を動かして歩くトラ型ロボットの組み立てキットです。モーターの回転をクランクで前足に伝え、その動きをリンクロッドで往復運動に変えて後足に伝えます。クリヤーイエローの足やボディ、透明なギヤボックスなど必要なパーツをすべてセットしました。はめ込みとビス止めで組み立てられ、配線もゴムパイプを使って手軽に完成します。顔や胴体に貼るシール、スプリング製のシッポもついてコミカルなムードもたっぷりです。●完成時のロボット本体全長116mm、全高90mm、全幅112mm。モーター、2チャンネルリモコンボックス付き。単3形電池2本使用(別売)。
■首をふりふり、ちょこまか歩くブタ型ロボット足の動きに合わせて首を左右にふりながらちょこちょこ歩くブタ型ロボットです。クリヤーピンクの顔や足、透明パーツのギヤボックスやスイッチなど必要な部品をすべてセット。はめ込みとビス止めで組立てられ、配線もゴムパイプを使って手軽に完成します。●全長=約135mm●重量=95g●ボディ材質=ABS樹脂製●ギヤボックス、モーター、逆転スイッチ付き。●胴体に立てられる旗付き。●組み立て用ドライバー付き。●単4電池1本使用(別売)●走行時間:アルカリ乾電池使用で約1時間。 遊びかたスロープやデコボコ道、毛足の長いカーペットではうまく歩けません。フローリングなどの平面がぴったりです。またローラーステーも付いていて、ミニ四駆コースを走らせることもできます。
■ジョッキーを乗せて軽快に走る左右の後足を同時に動かして軽快に走る、ジョッキーをのせた競走馬のロボットです。モーターの回転を後足に伝え、リンクロッドで前足に伝達。効率よくキックできるように後足の先にはグリップ部品、前足の先には抵抗にならないようにローラーをセットしました。●全長=約193mm●全高=約95mm●ボディ材質=ABS樹脂製●ギヤボックス、モーター付き。●馬のマスクやナンバー、ジョッキーの服や帽子をステッカーで用意●組み立て用ドライバー付き。●単3電池1本使用(別売)●走行時間:アルカリ乾電池使用で約1.5時間。 遊びかたスロープやデコボコ道、毛足の長いカーペットではうまく歩けません。フローリングなどの平面がぴったりです。またローラーステーも付いていて、ミニ四駆コースを走らせることもできます。