ギアの仕組みでポップに動くソーラー発電ロボットです。 完成サイズ:53×48×67mm 難易度:ふつう
マグネシウム燃料電池で動くクモ型ロボットです。 8本の足でリアルにスピーディーに動く姿にみんなびっくり! 完成サイズ:W120×D110×H45mm マグネシウムシート(3枚・1枚で約4時間走行
ソーラー発電で動く全地形型のローバーロボット 完成サイズ:75.5×79×105mm [商品特徴] 4輪駆動 6輪サスペンション ギアがかっこいい! 難易度:ふつう
FMワイヤレスマイクにボイスチェンジャーの機能をプラスした、ユニークなワイヤレスマイクです。 ボイスチェンジャー部は高音~低音に7段階で変化。さらにロボットボイスモードを装備していますので、多彩な変声を楽しむことができます。ワイヤレスマイク部は約15m先のFMラジオに飛ばせます。 ※到達距離は障害物の有無、FMラジオの性能で変化します。 ※マイクに向かってしゃべる声を集めるための「フード」を取り付けることができます。(フード作成型紙付きです。) 制作時間の目安:3~4時間 [仕様] 使用電池:単3×2本[別売] 消費電流:約13mA 周波数調整範囲:約75MHz~89MHz 到達距離:約15m 完成サイズ:W50×D35×H80mm
ラジオ用ICとパワーアップ用ICを使用したAMラジオです。 ラジオの受信方式にストレート方式を採用しているため、感度の微調整が不要となり、大変作りやすくなっています。 [学習要素]1.ラジオのしくみ2.回路図・ブロック図3.はんだ付け工作 [仕様] ・使用乾電池:単3×2本(3V)[別売] ・消費電力:平均約27mA ・受信周波数範囲:530~1650KHz ・受信方式:ストレート方式 ・使用半導体:IC 2個 ・基板寸法:100×100mm ※電池別
AM・FM・ワイドFM対応。 電波をデジタル処理するDPS方式のICを使用。 [学習内容] 1.ラジオの仕組み 2.電子回路図 3.はんだ付け工作 [商品仕様] 使用電池:単3電池2本(別売) 完成サイズ(W×D×H):122mm×50mm×80mm 消費電流:35mA(ボリューム位置中間時) 受信周波数:AM(522KHz~1620KHz)、FM(76MKz~108MHz) ※制作目安時間:4~6時間 ※要ハンダ
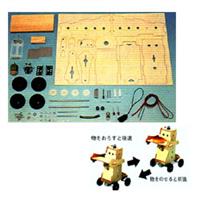
製作図付 電池別 使用乾電池:単3x2本 電気1の回路学習が新感覚のロボットづくりで学べます。 ●直列回路、並列回路、そして+、-の逆転回路など、電気回路の基礎学習がすべて含まれた教材キットです。 ●物をのせると前進、物をおろすと後退、その間ヘッドランプや目が点滅するなど、さまざまな機能を生かしたポーターロボットです。現代版お茶運び人形として楽しみながら学習・製作ができます。
製作図付 電池別 使用乾電池:単3x2本 物をのせるとランプをつけて前進、物をおろすと後退する組み立て学習に適した歩くお茶運び人形です。手を振りながら歩くロボトにも改造できます。
4タイプの超変形! ・2足歩行の恐竜モード ・角が動いてあるく昆虫モード ・ドリルが回転して走行モード ・2足歩行ロボモード 完成サイズ(目安):W95~53×D136×55×H105×55mm 組立タイプでサイズは変わります。
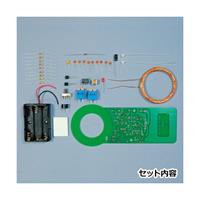
検出部にループコイルを使用した高感度な金属探知機です。 ブザーとしてLEDでお知らせします。 金属を検出する仕組みを解説した説明書付き。 ※壁の厚さや素材により検出できない場合もございます。 制作時間の目安:3~4時間 [学習要素] 1.金属を検出するしくみ 2.電子回路の働き [仕様] 使用電池:単4×3本[別売] 完成サイズ:W150×D62×H18mm 消費電流:検出時:最大約15mA、待機時:約2mA