FMワイヤレスマイクにボイスチェンジャーの機能をプラスした、ユニークなワイヤレスマイクです。 ボイスチェンジャー部は高音~低音に7段階で変化。さらにロボットボイスモードを装備していますので、多彩な変声を楽しむことができます。ワイヤレスマイク部は約15m先のFMラジオに飛ばせます。 ※到達距離は障害物の有無、FMラジオの性能で変化します。 ※マイクに向かってしゃべる声を集めるための「フード」を取り付けることができます。(フード作成型紙付きです。) 制作時間の目安:3~4時間 [仕様] 使用電池:単3×2本[別売] 消費電流:約13mA 周波数調整範囲:約75MHz~89MHz 到達距離:約15m 完成サイズ:W50×D35×H80mm
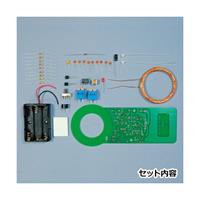
検出部にループコイルを使用した高感度な金属探知機です。 ブザーとしてLEDでお知らせします。 金属を検出する仕組みを解説した説明書付き。 ※壁の厚さや素材により検出できない場合もございます。 制作時間の目安:3~4時間 [学習要素] 1.金属を検出するしくみ 2.電子回路の働き [仕様] 使用電池:単4×3本[別売] 完成サイズ:W150×D62×H18mm 消費電流:検出時:最大約15mA、待機時:約2mA
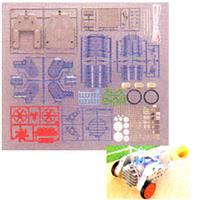
シースルーボディでメカが見え、動きがわかります。 専用コントローラで5つの指令を同時に制御。 [学習内容] 1.ロボットに対する知識と歴史 2.ギアの原理と基礎知識 3.平行クランク機能の原理 4.滑りクラッチの原理 [商品仕様] 使用電池:単1電池4本(別売) 完成サイズ:本体(最大旋回半径360mm、最大高510mm、基台部180mm×180mm) 完成サイズ:コントローラー(130mm×80mm×45mm) 質量:本体(1.05kg)、コントローラー(150g・電池含まず) 消費電流:300mA(無負荷時) 消費電圧:±3V ※制作目安時間:4~6時間 ※要ハンダ
ラジオ用ICとパワーアップ用ICを使用したAMラジオです。 ラジオの受信方式にストレート方式を採用しているため、感度の微調整が不要となり、大変作りやすくなっています。 [学習要素]1.ラジオのしくみ2.回路図・ブロック図3.はんだ付け工作 [仕様] ・使用乾電池:単3×2本(3V)[別売] ・消費電力:平均約27mA ・受信周波数範囲:530~1650KHz ・受信方式:ストレート方式 ・使用半導体:IC 2個 ・基板寸法:100×100mm ※電池別
【学習要素】 (1)ロボットに関する知識と歴史 (2)ギアの原理と基礎知識 (3)平行クランク機構の原理 (4)滑りクラッチの原理 シースルーボディでメカが見え、動きが分かります。 専用コントローラで5つの指令を同時に制御します。 (別売のソフトでPC制御ができます) 【仕様】 ●使用乾電池:単1x4本[別売] ●電源電圧:±3V ●消費電力:300mA~600mA(モーター1個当) ●完成寸法:(本体)最大旋回半径360mm、最大高510mm、基台部180x180mm、(コントローラ)W130xD80xH45 ●重量:(本体)1.05kg、(コトローラ)150g(電池含まず)
【学習要素】 (1)モーターの正・反転回路の原理 (2)ギアの原理と基礎知識 (3)樹脂成形の基礎知識 3つのモーターを搭載したタイヤ駆動型マシンてず。コントローラーにより4方向自在に走行し第3のモーターでボールのキャッチ・シュートが楽しめます。 【仕様】 ●使用乾電池:アルカリ単3x4本[別売]寿命約2.5時間 ●消費電力:動作時約550mA(最大約900mA) ●寸法:(本体)W130xD120xH77mm 突起部含まず、(コントローラ)W95xD31xH126mm コード長:2m ●重量:(本体)約250g、(コトローラ)約120g コード含む ●付属品:ボール
【学習要素】 (1)モーターの正・反転回路の原理 (2)ギアの原理と基礎知識 (3)樹脂成形の基礎知識 3つのモーターを搭載した6本足歩行のマシンです。コントローラにより4方向自在に歩行し第3のモータで勢い良くボールをシュートできます。 【仕様】 ●使用乾電池:アルカリ単3x4本[別売]寿命約2.5時間 ●消費電力:動作時約550mA(最大約900mA) ●寸法:(本体)W85xD170xH140mm 突起部含まず、(コントローラ)W95xD31xH126mm コード長:2m ●重量:(本体)約250g、(コトローラ)約140g コード含む ●付属品:ボール
【学習要素】 (1)モーターの正・反転回路の原理 (2)ギアの原理と基礎知識 (3)樹脂成形の基礎知識 3つのタイヤを搭載したタイヤ駆動型のメカ工作キットです。専用コントローラーで操作、直進や後退、右左折などの動きはもちろん、第3のモーターでファンを動かし、空気の力を借りてボールをキャッチ、シュートすることができます。 【仕様】 ●使用乾電池:アルカリ単3x4本[別売] ●消費電力:動作時約550mA(最大約900mA) ●寸法:(本体)W135xD200xH130mm 突起部含まず、(コントローラ)W95xD31xH126mm コード長:2m ●重量:(本体)約280g、(コトローラ)約140g コード含む
マグネシウム燃料電池で動くクモ型ロボットです。 8本の足でリアルにスピーディーに動く姿にみんなびっくり! 完成サイズ:W120×D110×H45mm マグネシウムシート(3枚・1枚で約4時間走行
4タイプの超変形! ・2足歩行の恐竜モード ・角が動いてあるく昆虫モード ・ドリルが回転して走行モード ・2足歩行ロボモード 完成サイズ(目安):W95~53×D136×55×H105×55mm 組立タイプでサイズは変わります。